Lidar (LiDAR) কি? Lidar ছবি সম্পূর্ণ করার জন্য সঠিক গভীরতা-সচেতন সেন্সিং প্রদান করতে ক্যামেরা কৌণিক রেজোলিউশনের সাথে রাডার রেঞ্জিং ক্ষমতাগুলিকে একত্রিত করে (চিত্র 1)।

চিত্র 1: ক্যামেরা, রাডার এবং লিডার হল স্বায়ত্তশাসিত গাড়ি চালানোর জন্য পছন্দের তিনটি প্রযুক্তি। (চিত্র ক্রেডিট: ADI)
চাক্ষুষ অংশ ক্যামেরা বা ড্রাইভার দৃশ্যমানতা, বস্তুর শ্রেণীবিভাগ এবং পার্শ্বীয় রেজোলিউশন প্রতিনিধিত্ব করে। অন্ধকার এবং আবহাওয়ার অবস্থা যেমন তুষার, ধুলো বা বৃষ্টি এই ক্ষমতাগুলিকে দুর্বল করতে পারে। রাডার অংশ RF সংকেত ফিরে প্রতিনিধিত্ব করে. দূরত্ব পরিমাপ করার সময় এই সংকেতটি আবহাওয়ার অবস্থা এবং অন্ধকার থেকে প্রতিরোধী। লিডার অংশটি আরও অবজেক্ট শ্রেণীবিভাগ, পার্শ্বীয় রেজোলিউশন, রেঞ্জিং এবং অন্ধকার অনুপ্রবেশ প্রদান করে সেন্সিং ছবি সম্পূর্ণ করতে পারে।
কিভাবে লিডার কাজ করে?
একটি লিডার সিস্টেমের মৌলিক উপাদানগুলির মধ্যে রয়েছে একটি বর্গাকার তরঙ্গ ট্রান্সমিটার সিস্টেম, লক্ষ্য পরিবেশ এবং একটি অপটিক্যাল রিসিভার সিস্টেম যা পরিবেশের বাইরের উপাদানগুলির দূরত্ব ব্যাখ্যা করতে ব্যবহৃত হয়। লিডার সেন্সিং পদ্ধতিটি প্রত্যাবর্তিত সংকেত (চিত্র 2) এর ফ্লাইটের সময় (ToF) বিশ্লেষণ করে পরিসীমা পরিমাপ করতে একটি স্পন্দিত লেজারের আকারে আলো ব্যবহার করে।
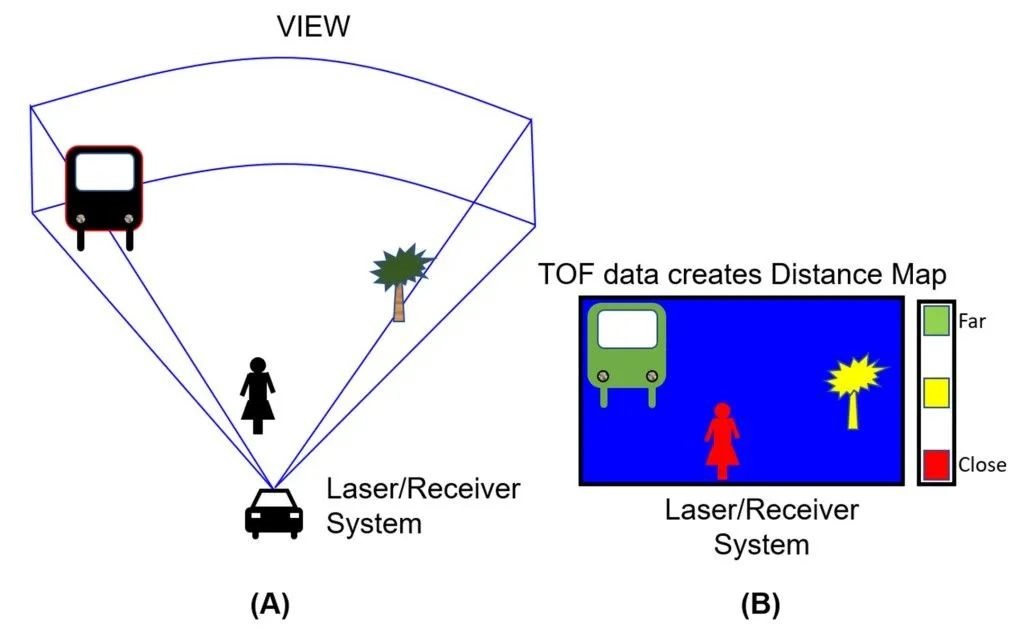
চিত্র 2: প্রতিটি লিডার ট্রান্সমিট ইউনিটের একটি ত্রিভুজাকার "দর্শনের ক্ষেত্র" রয়েছে। (চিত্র ক্রেডিট: বনি বেকার)
দূরত্বের অঙ্কন অপটিক্যাল ডিজিটাল সংকেতের উপর নির্ভর করে।
ডিজিটাল ডোমেনে সংকেত
লিডারের সার্কিট সমাধান হল স্বয়ংচালিত ট্রান্সিম্পড্যান্স এমপ্লিফায়ারের মাধ্যমে সংকেত গ্রহণের সমস্যা সমাধান করা। ইনপুট পর্যায়টি ফটোডিটেক্টর থেকে নেতিবাচক ইনপুট বর্তমান ডাল গ্রহণ করতে ব্যবহৃত হয় (চিত্র 3)।

চিত্র 3: একটি লিডারের ইলেকট্রনিক অংশে একটি লেজার ডায়োড ট্রান্সমিটার এবং দুটি ফটোডিওড রিসিভার থাকে। (চিত্র ক্রেডিট: বনি বেকার)
লেজার ডায়োড কাচের টুকরো মাধ্যমে ডিজিটাল ডাল প্রেরণ করে। এই সংকেতটি D2 ফটোডিওডেও প্রতিফলিত হয়। এই সংকেতের প্রক্রিয়াকরণ সিস্টেমের মধ্যে নির্মিত ট্রানজিট সময় এবং ইলেকট্রনিক বিলম্ব প্রদান করে।
ডিজিটাল লাইট সিগন্যাল পালস বস্তুতে আঘাত করে এবং অপটিক্যাল সিস্টেমে প্রতিফলিত হয়। ফিরে আসা পালসটি দ্বিতীয় ফটোডিওড ডি 1-এ মিরর করা হয়। D1 সংকেত পথের ইলেকট্রনিক অংশটি D2 সংকেত পথের মতোই। দুটি সংকেত মাইক্রোকন্ট্রোলারে (MCU) পৌঁছানোর পরে ফ্লাইটের সময় গণনা করা যেতে পারে।
বাজারের স্ন্যাপশট
স্বয়ংচালিত লিডার সিস্টেম দুটি গাড়ির মধ্যে দূরত্ব পরিমাপ করতে স্পন্দিত লেজার আলো ব্যবহার করে। স্বয়ংচালিত সিস্টেমগুলি ট্র্যাফিক পরিস্থিতিতে হঠাৎ পরিবর্তনের প্রতিক্রিয়া হিসাবে গাড়ির গতি এবং ব্রেকিং সিস্টেমগুলি নিয়ন্ত্রণ করতে লিডার ব্যবহার করে। লিডার আধা বা সম্পূর্ণ স্বয়ংক্রিয় গাড়ি সহায়তা ফাংশনে গুরুত্বপূর্ণ ভূমিকা পালন করে যেমন সংঘর্ষের সতর্কতা এবং পরিহার সিস্টেম, লেন-কিপ সহায়তা, লেন-প্রস্থান সতর্কতা, অন্ধ-স্পট মনিটর এবং অভিযোজিত ক্রুজ নিয়ন্ত্রণ। অটোমোটিভ লিডার আগের গাড়ির অটোমেশন সিস্টেমে রাডার সিস্টেম প্রতিস্থাপন করছে। লিডার সিস্টেমগুলি কয়েক মিটার থেকে 1,000 মিটার পর্যন্ত হতে পারে।
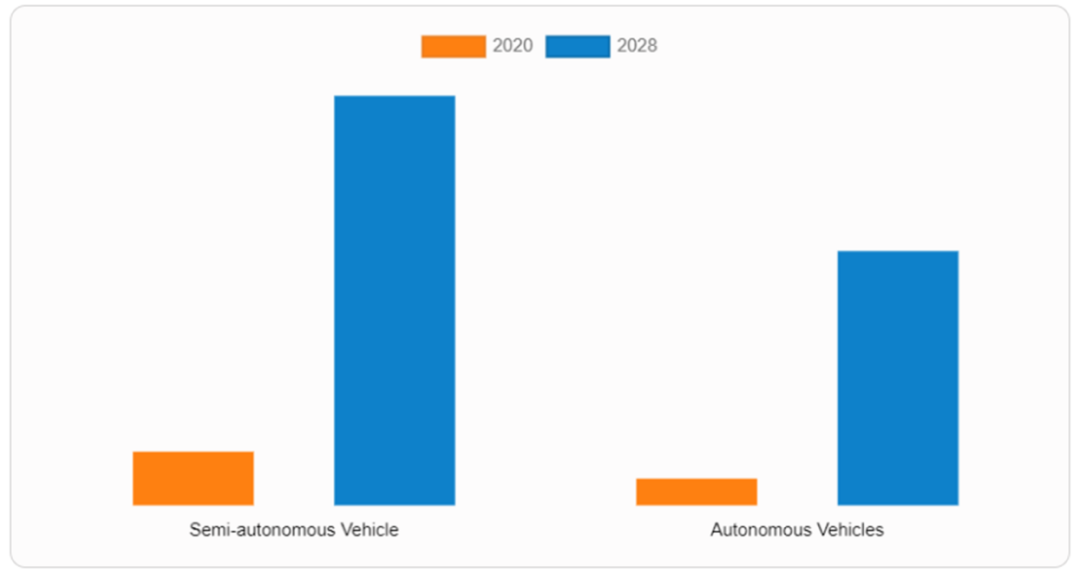
চিত্র 4: স্বয়ংচালিত লিডার বাজার আধা-স্বায়ত্তশাসিত এবং সম্পূর্ণ স্বায়ত্তশাসিত যানবাহন অ্যাপ্লিকেশনগুলিতে বিভক্ত। (ছবির উৎস: অ্যালাইড মার্কেট রিসার্চ)
স্ব-চালিত গাড়িগুলি ইতিমধ্যেই ব্যাপকভাবে ব্যবহার করা হচ্ছে এবং লিডার ইমেজিং সিস্টেমগুলি পরিস্থিতিকে আরও উন্নত করবে। রাডার, ক্যামেরা এবং লিডার সরঞ্জামগুলি এখনও আধা-স্বায়ত্তশাসিত এবং সম্পূর্ণ স্বায়ত্তশাসিত ড্রাইভিংয়ের জন্য পছন্দের প্রযুক্তি, এবং লিডারের দাম কমছে এবং বাজার এই পরিবর্তনকে ত্বরান্বিত করছে।
কপিরাইট @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - China Fiber Optic Modules, Fiber Coupled Lasers Manufacturers, Laser Components Suppliers সর্বস্বত্ব সংরক্ষিত।